En esta experiencia hemos conectados 5 actuadores a la placa BT-328 controlados por cada botón.
+
Materiales empleados
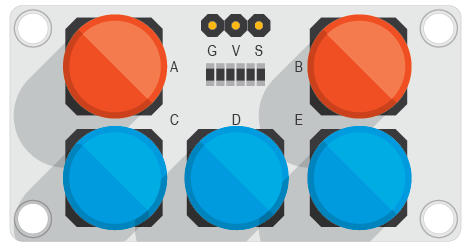 La botonera no es más que un conjuntos de botones o pulsadores; se trata
de un sensor de tipo analógico que transmite una señal analógica (entre
0 y 1023) que será interpretada por la placa para saber qué botón ha
sido pulsado. Podría parecer un sensor digital, puesto que tiene
pulsadores (que se han definido como digitales), pero se trabaja con una
señal analógica ya que si no sería imposible determinar qué botón ha
sido pulsado si la placa recibe tan solo un ‘1’ o un ‘0’. Este
componente se puede encontrar por ejemplo (con muchos mas botones) en
los teclados de ordenador.
La botonera no es más que un conjuntos de botones o pulsadores; se trata
de un sensor de tipo analógico que transmite una señal analógica (entre
0 y 1023) que será interpretada por la placa para saber qué botón ha
sido pulsado. Podría parecer un sensor digital, puesto que tiene
pulsadores (que se han definido como digitales), pero se trabaja con una
señal analógica ya que si no sería imposible determinar qué botón ha
sido pulsado si la placa recibe tan solo un ‘1’ o un ‘0’. Este
componente se puede encontrar por ejemplo (con muchos mas botones) en
los teclados de ordenador.
Un servo de rotación continua es un motor cuyo circuito electrónico nos
permite controlar la dirección de giro así como la velocidad del mismo. A
diferencia del miniservo, no se detiene en una posición, sino que gira
continuamente.
Son muy utilizados en robótica y en muchas aplicaciones
electrónicas, como en lectores de DVD, escaleras mecánicas, ascensores,
etc., donde es necesario conocer la velocidad y dirección de giro.

Un LED (light-emitting diode) es un componente capaz de emitir luz; más concretamente se trata de un diodo, un componente que solo deja pasar la electricidad en un sentido y la bloquea en el otro. En el caso de los LED, cuando circula electricidad emiten luz. Los LED son baratos, gastan muy poca energía y pueden llegar a ser muy luminosos. Se utilizan mucho en sistemas electrónicos y están sustituyendo a la iluminación tradicional por su eficiencia.

El zumbador o buzzer, es un componente capaz de producir sonidos a diferentes frecuencias. Son utilizados en multitud de sistemas para producir señales o avisos, como en despertadores, timbres, temporizadores de electrodomésticos (como el de un horno), etc.
Esquema de conexión

Código Bitbloq

Código Arduino
/*** Included libraries ***/
#include <Servo.h>
#include <BitbloqButtonPad.h>
/*** Global variables and function definition ***/
int zumbador_0 = 0;
Servo servo_continuo_0;
int led_0 = 7;
int led_1 = 6;
ButtonPad botonera_0(A5);
/*** Setup ***/
void setup() {
servo_continuo_0.attach(13);
pinMode(led_0, OUTPUT);
pinMode(led_1, OUTPUT);
}
/*** Loop ***/
void loop() {
servo_continuo_0.write(90);
digitalWrite(led_0, LOW);
digitalWrite(led_1, LOW);
while (botonera_0.read() == 'A') {
servo_continuo_0.write(0);
}
while (botonera_0.read() == 'B') {
servo_continuo_0.write(180);
}
while (botonera_0.read() == 'C') {
digitalWrite(led_0, HIGH);
}
while (botonera_0.read() == 'D') {
digitalWrite(led_1, HIGH);
}
while (botonera_0.read() == 'E') {
tone(zumbador_0, 261, 100);
delay(100);
tone(zumbador_0, 440, 500);
delay(500);
}
delay(100);
}
Vídeo de la experiencia
Comentarios
Publicar un comentario